
Presentation / Installation
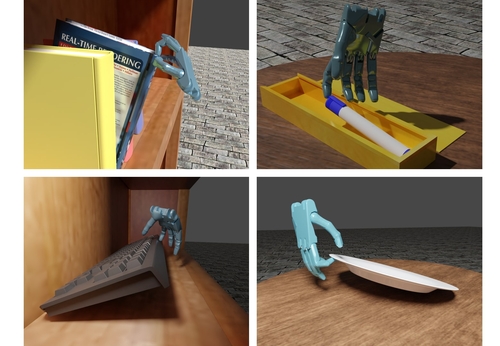
Synthesizing Dexterous Nonprehensile Pregrasp for Ungraspable Objects
DescriptionWe propose a pipeline to synthesize non-prehensile, pre-grasping hand motions for daily objects in contextual environments. Our pipeline can efficiently generate hand and object trajectories that are physically feasible by simulation and kinematically achievable by the dexterous hand.

Event Type
Technical Paper
TimeMonday, 7 August 20232:55pm - 3:05pm PDT


LocationPetree Hall C
ACM Digital Library
Technical Paper PDF
Session Time & Location
Research & Education
Livestreamed
Recorded
Animation/Simulation
Artificial Intelligence/Machine Learning
FC
FCS
V
VS
EFC
