
Presentation / Installation
Realistic Dexterous Manipulation of Virtual Objects With Physics-based Haptic Rendering
SessionEmerging Technologies
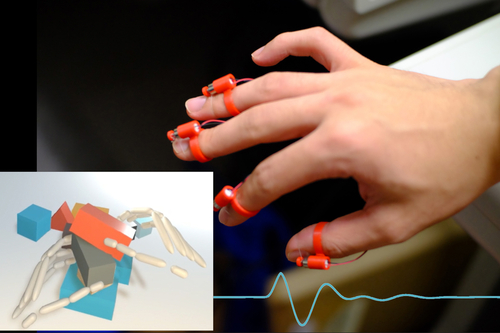
DescriptionThis research presents a physics-based system for the realistic manipulation of virtual objects in VR using a coreless motor as a haptic actuator and a physics engine to simulate physics effects. The device provides haptic feedback through multi-channel audio signals and does not interfere with real-world operations or hand tracking.
Event Type
Emerging Technologies
TimeSunday, 6 August 20231:30pm - 5pm PDT


LocationWest Building, Rooms 150-153
Session Time & Location
Gaming & Interactive
New Technologies
Research & Education
Haptics
Metaverse
Virtual Reality
FC
FCS
E
EFC
EE
