
Presentation / Installation
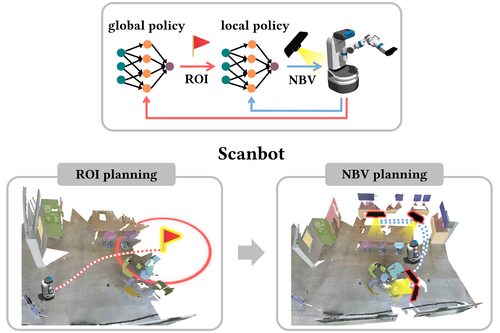
ScanBot: Autonomous Reconstruction via Deep Reinforcement Learning
SessionDeep Geometric Learning
DescriptionWe present a hierarchical deep-reinforcement-learning-based approach for autonomous reconstruction by alternating between a global region-of-interest (ROI) planning policy to improve the scanning efficiency and a local next-best-view (NBV) planning policy to enhance the reconstruction quality. Two dedicated auxiliary learning tasks are also proposed to accelerate the training of global policy.
Event Type
Technical Paper
TimeThursday, 10 August 20232:22pm - 2:33pm PDT


LocationRoom 515 A
ACM Digital Library
Technical Papers pdfs
Session Time & Location
Research & Education
Livestreamed
Recorded
Modeling
Rendering
FC
FCS
V
VS
EFC
