
Presentation / Installation
5. Learning Human-like Locomotion Based on Biological Actuation and Rewards
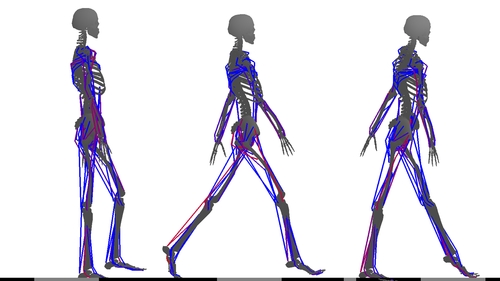
DescriptionWe propose a method of learning a policy for human-like locomotion via deep reinforcement learning based on a human anatomical model, muscle actuation, and biologically inspired rewards, without any inherent control rules or reference motions.
Event Type
Poster
TimeWednesday, 9 August 20239am - 5:30pm PDT


LocationWest Lobby Entrance
ACM Digital Library
Poster PDF
Session Time & Location
Animation/Simulation
Artificial Intelligence/Machine Learning
Dynamics/Simulation
FC
FCS
E
EFC
EE
