
Presentation / Installation
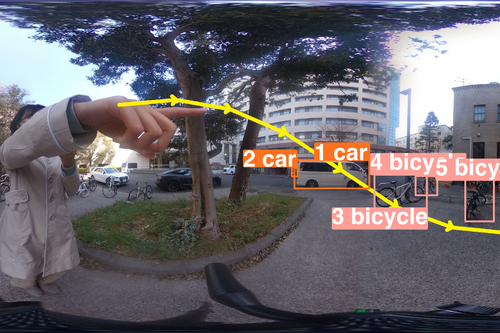
33. Point Anywhere: Directed Object Estimation from Omnidirectional Images
DescriptionWe propose a method using an omnidirectional camera to eliminate the user/object position constraint and the left/right constraint of the pointing arm.
Event Type
Poster
TimeThursday, 10 August 20239am - 5:30pm PDT


LocationWest Lobby Entrance
ACM Digital Library
Poster PDF
Session Time & Location
Artificial Intelligence/Machine Learning
Computer Vision
FC
FCS
E
EFC
EE
