
Presentation / Installation
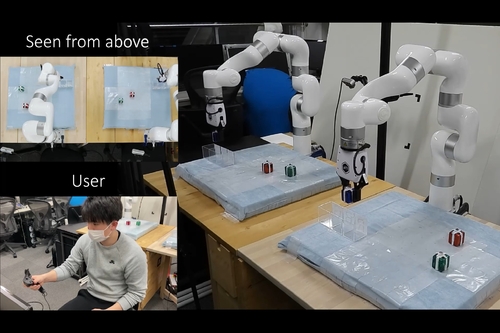
SyncArms: Gaze-driven Target Object-oriented Manipulation for Parallel Operation of Robot Arms in Distributed Physical Environments
SessionEmerging Technologies
DescriptionWe present a novel system for a manipulation of multiple bodies by using gaze tracking and object recognition, which simultaneously overcomes two problems when performing a parallel task: positional problem and decay of embodiment over the extended bodies.
Event Type
Emerging Technologies
TimeTuesday, 8 August 202311am - 5pm PDT


LocationWest Building, Rooms 150-153
Session Time & Location
Gaming & Interactive
New Technologies
Research & Education
Robotics
Telepresence
FC
FCS
E
EFC
EE
