
Presentation / Installation
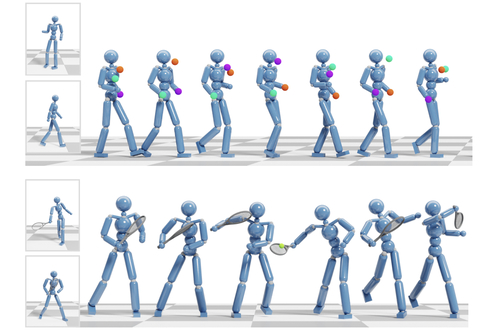
Composite Motion Learning With Task Control
SessionCharacter Animation
DescriptionWe present a multi-objective learning approach for composite and task-driven motion control for physically simulated characters. Without needing to manually blend reference motions, our approach learns composite motions directly from multiple reference sources across distinct body parts and supports sample-efficient training from pretrained controllers in an incremental manner.
Event Type
Technical Paper
TimeWednesday, 9 August 202310:45am - 10:56am PDT


LocationPetree Hall C
ACM Digital Library
Technical Papers pdfs
Session Time & Location
Research & Education
Livestreamed
Recorded
Animation/Simulation
Artificial Intelligence/Machine Learning
FC
FCS
V
VS
EFC
